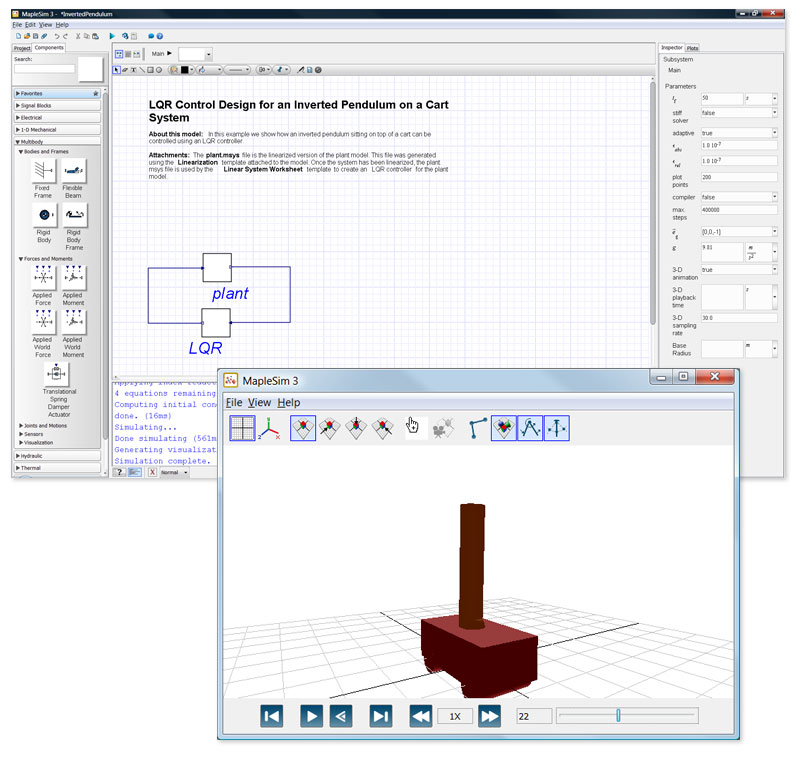
LQR Control Design for an Inverted Pendulum on a Cart System
In this example we show how an inverted pendulum sitting on top of a cart can be controlled using an LQR controller.
Attachments: The plant.msys file is the linearized version of the plant model. This file was generated using the Linearization template attached to the model. Once the system has been linearized, the plant.msys file is used by the Linear System Worksheet template to create an LQR controller for the plant model.
|
|